abstract:高光谱图像攻击中需要了解的知识
story:这篇没有story:D
A. 高光谱图像数据集
高光谱:像素的记录格式不再是rgb,而是按照光谱波段记录
Indian pine
-
只有一张图片,分辨率为145*145
-
该图片的每个像素作为一个样本,每个像素都由一个200个数字描述,表示各个波段的反射强度,理论上属于0-1
-
这张图拍的主要为农作物,共有16个类别,即10249个样本对应16个类别,包括草地、玉米地、林地等
-
Indian Pines 数据集的规模: 145*145*200 (width height 波段数)
-
下载得到的数据集形式
- Indian_pines.mat :原始的Indian Pines 数据集: 145*145*220
- Indian_pines_corrected.mat 矫正后的Indian Pines 数据集: 145*145*200
- Indian_pines_gt.mat 标签矩阵 145*145
- Indian_pines.mat :原始的Indian Pines 数据集: 145*145*220
部分内容引自知乎
- AVIRIS 成像光谱仪成像波长范围为 0.4-2.5μm,是在连续的 220 个波段对地物连续成像的,但是由于第 104-108,第 150-163 和第 220 个波段不能被水反射,因此,我们一般使用的是剔除了这 20 个波段后剩下的 200 个波段作为研究的对象。
- 145*145 = 21025=10776(背景,黑)+ 10249(多种地物,彩)
> 10249 = 各类地物占得像素个数。
解混
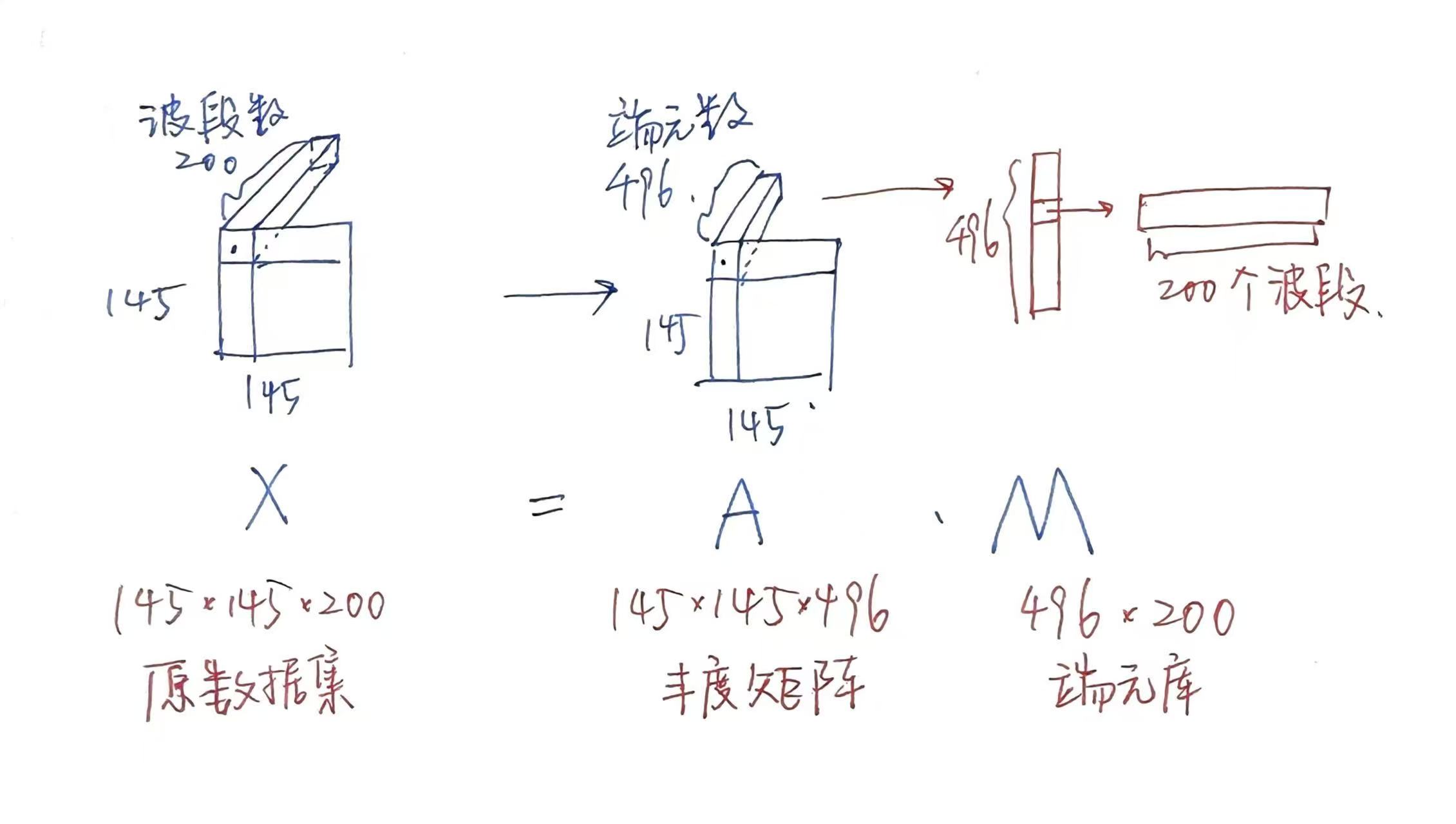
- 我们对丰度矩阵A添加扰动,丰度矩阵表示每个像素中不同端元的占比,端元库表示不同端元(纯净)在光谱中200个波段下的值
B. Universal Perturbation
- 算法:在每一轮迭代中都找到$\Delta v$
C. 经典神经网络的训练逻辑
DataLoader
- 一个迭代器
pbar = tqdm(enumerate(attack_loader), total=len(attack_loader))
for index, (_, abun, abun_sum, noise, labels, _) in pbar:
# 每次迭代使用一个batch的数据来更新扰动(正常32个,但如果最后一组样本量不足32,那就不足32,不舍弃)
用for迭代,每次迭代使用一个batch的数据来更新扰动(正常32个,但如果最后一组样本量不足32,那就不足32,不舍弃)
- 每个batch是一个元组,元组中有多个元素,每个元素都是一个pytorch张量,这些张量有不同的shape,而所有张量的第一维,都是batch_size。例如这里abun的形状就是$[32,6 ,15,15]$,也就是$\text{[B, C, H, W]}$
- $C$:端元数(端元要经过选择 在光谱库的496个端元中筛选出整张数据集中存在的端元 最终只剩6个端元【Indian_pines数据集】)
- $H、W$:高宽(输入并非一个像素,而是围绕一个像素切割出的15*15的patch,这个切割的过程有点像卷积核对图像的遍历)
- 每输入一个batch,也就是输入这些张量。
批量梯度下降
公式a:以batch_size=10为例
$\theta_j := \theta_j - \alpha \frac{1}{10} \sum_{k=i}^{(i+9)}(h_{\theta}(x)-y{(k)})x_j$
$\theta_j$:第$j$个参数
$\alpha$:步长
$\alpha$后面那一坨:目标函数$(h_{\theta}(x)-y{(k)})$对$x_j$ 的偏导 的平均值
伪代码:
for m in epoch:
for n in batch_num:
for i in batch_size:
公式a
$\J = sum_{k}
-
每个epoch要完整遍历一遍数据集
-
数据集被划分为很多个batch,依次遍历这些batch
-
每个batch内部并行计算,即同时计算所有样本的预测值、损失并求平均
-
每算完一个batch更新一次参数:
- 清理其他batch的梯度
- 对之前得到的这个batch的平均损失求梯度
- 反向传播
- 更新参数
-
梯度不累计,每个batch一清理
-
参数累计
D. 攻击算法
sgaa
扰动逻辑
- 把perturb当做参数,放入传统神经网络中进行优化
- 逻辑同深度学习:
fsgm
扰动逻辑
perturb_i = (self.eplison*torch.sum(abun_adv.grad, dim=0).unsqueeze(0).sign()).detach()
# 沿着丰度梯度正方向,计算扰动增量
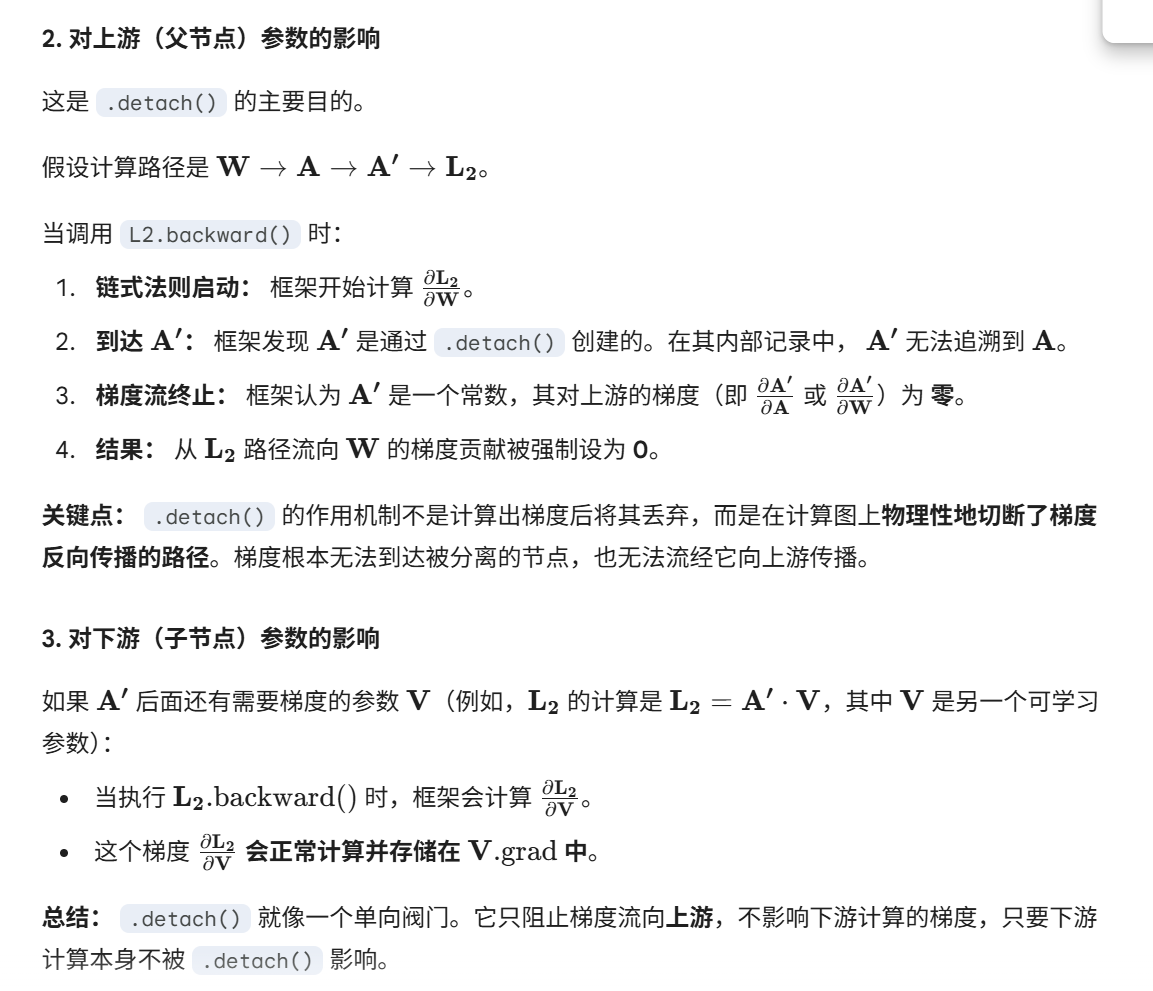
perturb = torch.clamp(perturb+perturb_i, min=-self.eplison, max=self.eplison).detach()
# 分离计算图,当做常数,切断上游梯度传递,切断上游参数对梯度的影响,但每次迭代,上游参数的改变会刷新这个分离出的perturb
-
“上游”?:
- 参数: $\mathbf{W}$ (需要梯度的参数)
- 中间计算: $\mathbf{A} = \mathbf{W} \cdot 2$
- 损失 1 (L1): $\mathbf{L_1} = \mathbf{A} \cdot 5$
- 损失 2 (L2): $\mathbf{L_2} = \mathbf{A} \cdot 10$
该例子的计算图如下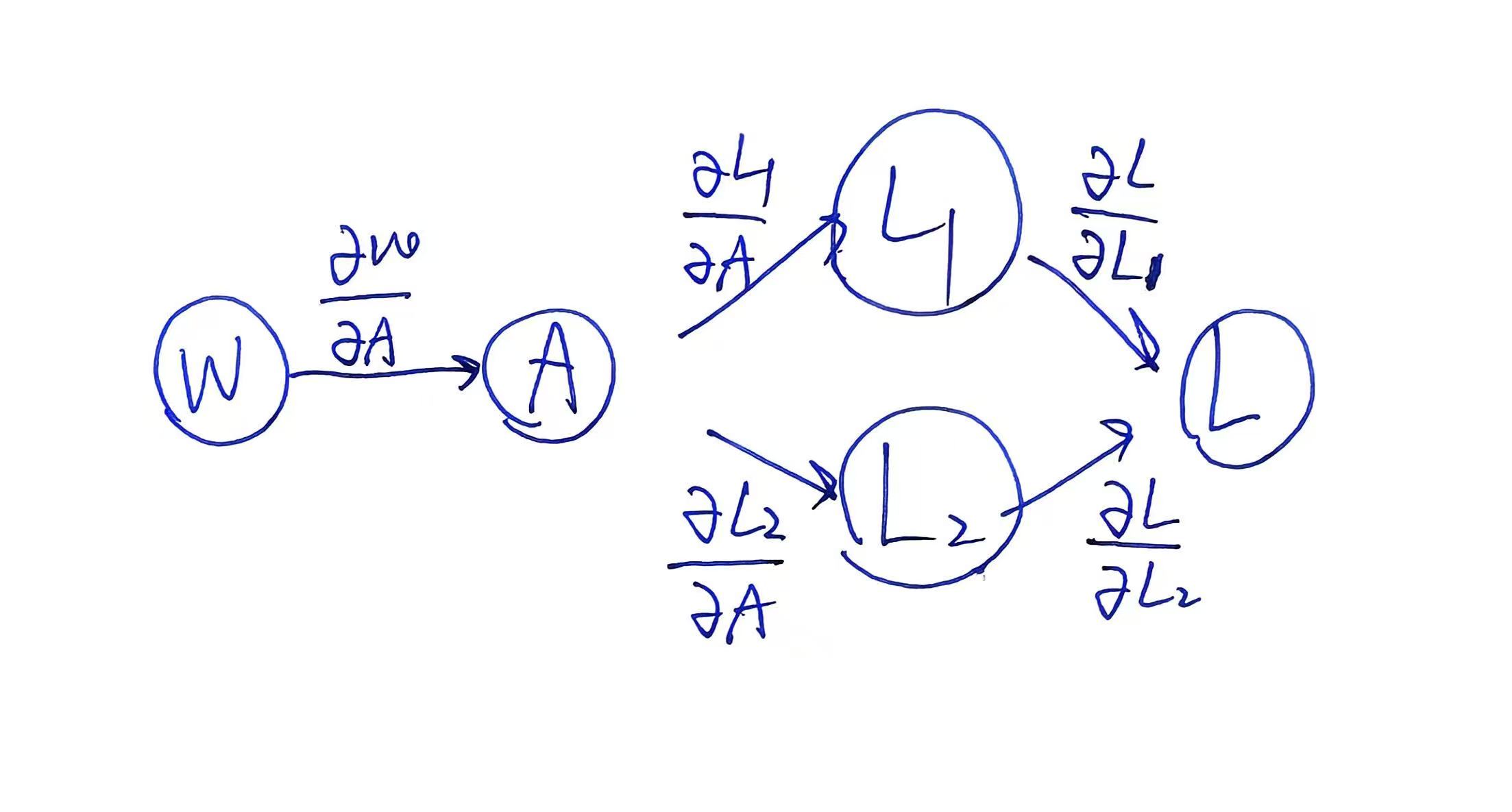
-
不涉及optimizer,通过分离计算图获取perturb并在每一次样本训练下更新